一个带有铰接机构的可压缩机器人,灵感来自昆虫的简单性。图片来源:Kaushik Jayaram,动物启发运动和机器人实验室
人类的大脑含有令人印象深刻的860亿神经元,但昆虫的神经元要少得多。蜜蜂用大约100万个神经元来管理它所有复杂的行为,而微小的Megaphragma mymaripenne黄蜂生活在不到1万的地方。研究昆虫如何执行关键任务,让科学家们深入了解机器人如何在有限的处理能力下完成复杂的动作,并指向在苍蝇和蟑螂的规模上建造它们。
一群空中飞行、家蝇大小的机器人可能会在将传感器送到难以到达的地方、提供远程检查内部(比如管道)或从森林树冠层收集数据方面发挥作用。由于它们的重量,在人类周围使用它们应该是相对安全的。最重要的是,它们提出了设计挑战,工程师可以从中学习,西雅图华盛顿大学昆虫机器人自主实验室的机械工程师Sawyer Fuller说。“从设计受极端规模限制的机器人中可以学到很多东西,”他说。“我们将学习如何制造高效的航空电子设备。我们将想出创造机制的新方法。这将迫使我们成为超微型的公司。”
自然指数2022人工智能和机器人
特别是,因为一个昆虫大小的机器人可能只携带大约100毫瓦的电力,他们的设计促使研究人员重新思考如何将智能纳入其中。“人们认为昆虫比脊椎动物更简单,所以它们可能有更简单的处理或智能机制,”科罗拉多大学博尔德分校动物启发运动和机器人实验室的机器人专家Kaushik Jayaram说。
一种方法可能是将一些控制决策从处理器转移到机器人的物理设计上,本质上是将智能构建到身体中。例如,富勒正在研究一种需要迎风飞行的机器人。传统的方法是让传感器在中央处理器操纵机器之前检测风向。富勒发现,他可以简单地在机器人的尾部添加翼片,空气在翼片周围流动的方式将自动使机器人迎风行驶,而无需任何额外的传感器。
模拟昆虫的感觉系统也可以在不增加电力需求的情况下提高性能。在风洞测试中,富勒发现苍蝇不仅通过视觉控制导航,还通过风对触角的压力感知空速。他说,将不同的低分辨率传感器组合在一起,可能比试图将一个复杂的相机安装在一个微小的身体上更有效。
此外,小型机器人也有可能撞到物体上而不会受到重大伤害,因为相对于它们的机械强度,碰撞的力很小。贾亚拉姆正试图利用这一原理来模仿蟑螂。当蟑螂接近墙壁时,它们不会减速,而是直接撞到墙上,并利用这种力量使身体向上倾斜以爬上墙。Jayaram已经在手掌大小的机器蟑螂身上证明了类似的能力,他还希望制造一便士大小的机器人,通过它们的几何结构,可以模仿蟑螂折叠身体的方式,通过小到3毫米的缝隙。
富勒正在研究大黄蜂大小、牙签重量的飞行机器人,翅膀由碳纤维支撑的聚酯薄膜制成。他说,除了自然激发特定的功能,工程师还可以学习以类似于自然界的方式发展他们的机械设计和控制系统,根据之前迭代的成功和失败来调整每个版本。富勒说,大自然“同时进化了身体和控制系统。在工程学中,你学习如何设计一个控制系统,或者你学习如何设计一个好的机械臂。但这种同时做这两件事的做法并不常见。”
Jayaram也确信,弄清昆虫如何应对挑战将为科学家提供解决方案。“当我们开始建造更复杂的机器人,需要与现实世界交互时,大自然可以成为一位强大的老师。”
 利用人工智能和机器人为科学和社会服务
利用人工智能和机器人为科学和社会服务 人工智能和机器人正在从四个方面帮助改变其他研究领域
人工智能和机器人正在从四个方面帮助改变其他研究领域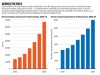 人工智能和机器人研究加速增长
人工智能和机器人研究加速增长 Pandemic的癌症积压病例得到了人工智能创新的治疗
Pandemic的癌症积压病例得到了人工智能创新的治疗 农村地区错过了人工智能的机会
农村地区错过了人工智能的机会 大型科技公司正在从学术界挖走人工智能人才吗?
大型科技公司正在从学术界挖走人工智能人才吗?