








文摘gydF4y2Ba
生物结构整合形态测量学(shape-based规则)与材料设计来最大化生物生存。的外骨骼装甲鱼,gydF4y2BaPolypterus senegalusgydF4y2Ba、平衡灵活性与防止掠夺性和领土的威胁。外骨骼是已知的材料特性;但是,底层的各向异性弹性无特征几何设计规则。在这里,我们显示规模形状、清晰度和复合建筑生产各向异性力学仿生,多材料3 d打印的原型。被动加载(覆盖)表明,兼容尺度有助于机械各向异性之间的连接。模拟和实验活动加载(弯曲)orientation-dependent刚度在数量级的范围,包括机械隐形的尺度不增加刚度外骨骼。结果说明形态测量学提供了一个强大的工具来优化复合架构的灵活性独立的不同组成部分的材料组成。形态学设计策略将使我们预料引入灵活、保护系统调到复杂的形状和功能。gydF4y2Ba
介绍gydF4y2Ba
许多动物进化出了坚硬的外骨骼抵御捕食或竞争攻击(如甲壳类动物gydF4y2Ba1gydF4y2Ba、昆虫gydF4y2Ba2gydF4y2Ba,软体动物gydF4y2Ba3gydF4y2Ba、海龟gydF4y2Ba4gydF4y2Ba,gydF4y2Ba5gydF4y2Ba,海马gydF4y2Ba6gydF4y2Ba,gydF4y2Ba7gydF4y2Ba,硬骨鱼gydF4y2Ba8gydF4y2Ba,gydF4y2Ba9gydF4y2Ba,gydF4y2Ba10gydF4y2Ba)。这些“天然铠甲”结合微观和纳米材料设计(例如,材料选择、晶体学、复合体系结构、孔隙度、表面化学)与宏观尺度几何设计规则gydF4y2Ba11gydF4y2Ba,gydF4y2Ba12gydF4y2Ba,gydF4y2Ba13gydF4y2Ba,gydF4y2Ba14gydF4y2Ba,gydF4y2Ba15gydF4y2Ba提供额外的功能gydF4y2Ba16gydF4y2Ba如增强机械性能gydF4y2Ba17gydF4y2Ba,gydF4y2Ba18gydF4y2Ba、透明度gydF4y2Ba19gydF4y2Ba或灵活性gydF4y2Ba20.gydF4y2Ba,gydF4y2Ba21gydF4y2Ba。鱼具有高度灵活的装甲外骨骼这吸引了特别感兴趣领域的仿生设计gydF4y2Ba22gydF4y2Ba,gydF4y2Ba23gydF4y2Ba,gydF4y2Ba24gydF4y2Ba。装甲的鱼gydF4y2BaPolypterus senegalusgydF4y2Ba(bichir)拥有一个叠瓦状的外骨骼,阐明,矿化规模提供了贯入阻力掠夺性和领土袭击而授予鱼蛇形流动gydF4y2Ba25gydF4y2Ba,gydF4y2Ba26gydF4y2Ba,gydF4y2Ba27gydF4y2Ba,gydF4y2Ba28gydF4y2Ba。在复杂的几何尺度的同时,沿着身体长度,形状变化和保护功能研究gydF4y2Ba20.gydF4y2Ba,gydF4y2Ba27gydF4y2Ba,gydF4y2Ba29日gydF4y2Ba,gydF4y2Ba30.gydF4y2Ba,gydF4y2Ba31日gydF4y2Ba,gydF4y2Ba32gydF4y2Ba尚未没有综合分析的几何设计规则,如规模几何,当地的发音,和全球大会。gydF4y2Ba
在这里,我们整合microtomographic成像技术的发展,参数化建模、和多材料3 d打印技术来实现三个目标:(1)翻译层次装配的几何规则gydF4y2Bap . senegalusgydF4y2Ba外骨骼合成,灵活的复合模型,(2)实验和计算评估原型的机械行为,和(3)阐明单个组件的结构关系,确定形状可以用作材料设计参数优化复合材料的各向异性行为。参数化三维建模被用来设计仿生原型通过生成抽象模型尺度从x射线microtomography数据和多材料组件集成到灵活的组合装配。多材料3 d打印技术被用来制造仿生柔性装甲原型。各向异性弹性的原型研究被动荷载作用下(自重)。机械测试被用来量化的原型的抗弯刚度活跃加载(弯曲),和有限元模拟开发相关内部压力与机械响应浓度。gydF4y2Ba
结果显示复杂的形状有助于当地规模系数尺度流动机制,确定弯曲响应全球原型和生成各向异性力学行为。最灵活的方向,包括一个尺度的机械无形的盔甲组装不增加刚度,对应相关生理弯曲模式的鱼。与一个原型设计方案,生成一系列广泛的力学行为与刚度等几个数量级,因此展示形态测量学可以调整的灵活性防护,复合体系结构没有改变或其组成材料体积分数。我们预料的几何变化引入合成原型将生成灵活、保护系统,很好地适应复杂形状,运动学和功能的分化gydF4y2Ba33gydF4y2Ba。gydF4y2Ba
结果gydF4y2Ba
翻译的几何规则组装仿生原型gydF4y2Ba
的gydF4y2Bap . senegalusgydF4y2Ba外骨骼覆盖整个表面从头到尾的鱼。鳞片排列在螺旋列风绕着身体,用一个角度(gydF4y2BaβgydF4y2Ba)60°之间的螺旋,paraserial轴和水平面直身体姿势,无花果的示意图所示。gydF4y2Ba1gydF4y2Ba。的分割尺度,其复杂的几何形状,和他们共同的发音机制允许鱼能实现大,双向的身体在轴向曲率弯曲(图。gydF4y2Ba1 bgydF4y2Ba)。gydF4y2Ba

一个gydF4y2Ba左边的一条鱼的示意图显示螺旋排列的尺度和角度gydF4y2BaβgydF4y2Ba= 60°螺旋(paraserial)轴与水平面(由作者草图)。gydF4y2BabgydF4y2Ba麻醉gydF4y2Bap . senegalusgydF4y2Ba标本(体长= 219毫米)表现出双向的身体在轴向弯曲曲率。比例尺= 10毫米。gydF4y2Ba
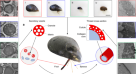
p . senegalusgydF4y2Ba天平使用x射线扫描microtomography(µCT)生成重构,数字3 d模型。尺度不同的形状和大小逐渐在鱼外骨骼,为了产生一个tileable规模几何,µCT来自一对相邻尺度的数据被组合成一个组合规模图所示。gydF4y2Ba2gydF4y2Ba。个体规模几何复杂和不同的功能,包括挂钩(P),套接字(S),前处理(美联社),前货架(),凹前保证金(AM)和增厚轴脊(AR)。天平使用两个主要关节与他们的邻居和形成一个组装的外骨骼(无花果。gydF4y2Ba2 cgydF4y2Ba):铰接peg-and-socket paraserial方向的联合专栏内的尺度,和滑动interserial方向列之间的搭接接头尺度位于角gydF4y2BaβgydF4y2Ba远离paraserial轴。gydF4y2Ba

一个gydF4y2Ba3 dµCT重建的平均规模突显出几何特点:挂钩(P),套接字(S),前处理(美联社),前货架(),凹前保证金(AM),轴向岭(AR)。比例尺= 1毫米。gydF4y2BabgydF4y2Ba均匀组装生物尺度的几何,内景(比例尺= 1毫米),和gydF4y2BacgydF4y2Ba面向外部视图,显示paraserial和interserial轴角gydF4y2BaβgydF4y2Ba= 60°。比例尺= 1毫米。gydF4y2BadgydF4y2Ba已故的生物外骨骼的照片gydF4y2Bap . senegalusgydF4y2Ba标本。比例尺= 5毫米。gydF4y2BaegydF4y2Ba抽象几何图形(3 d模型)的一个单一的单位规模放大20毫米的长度。比例尺= 1毫米。gydF4y2BafgydF4y2Ba联想三维模型的装配包含必要的部分骨骼外集会,包括尺度、衬底,paraserial连接,scale-substrate附件,内景(比例尺= 20毫米),gydF4y2BaggydF4y2Ba外部视图(比例尺= 20毫米)gydF4y2BahgydF4y2Ba剖视图。比例尺= 20毫米。gydF4y2Ba我gydF4y2Ba多材料3 d打印的原型的照片的组装。gydF4y2Ba
胶原Sharpey的纤维之间的挂钩和套接字相邻尺度上加强关节,和胶原,多层次的纤维gydF4y2Ba致密层gydF4y2Ba高度的底层软组织真皮轴脊gydF4y2Ba27gydF4y2Ba。保护外骨骼的一部分显示在无花果。gydF4y2Ba二维gydF4y2Ba。gydF4y2Ba
原型设计使用计算机辅助设计(CAD)软件呈现个体规模几何为一个抽象(图3 d模型。gydF4y2Ba2 egydF4y2Ba)20毫米长度的一个总体菱形形状允许一个锥形尺度之间的重叠区域,四面体挂钩,相应的倒凹窝。参数化建模用于复制规模抽象到一个二维数组保存联合发音机制gydF4y2BaβgydF4y2Ba= 60°之间paraserial和interserial轴(无花果。gydF4y2Ba2 f-hgydF4y2Ba)。底层基板了,两个兼容的结缔组织被集成到模型元素paraserial规模规模和衬底之间的连接和附件(无花果。gydF4y2Ba2 fgydF4y2Ba)。gydF4y2Ba
翻译后的3 d设计是多材料制造的,喷墨3 d印刷,使用VeroWhite光敏聚合物(硬塑料和弹性模量(gydF4y2BaEgydF4y2Ba)= 2.0的绩点gydF4y2Ba34gydF4y2Ba,gydF4y2Ba35gydF4y2Ba)的尺度和TangoPlus光敏聚合物(橡胶弹性体gydF4y2BaEgydF4y2Ba= 0.63 MPagydF4y2Ba34gydF4y2Ba,gydF4y2Ba35gydF4y2Ba)软组件(Sharpey的纤维、致密层和底层组织)产生合成,灵活组合原型(图。gydF4y2Ba2我gydF4y2Ba)。我们选择这种3 d打印技术由于其显著的优势,超过其他的制造技术gydF4y2Ba21gydF4y2Ba,gydF4y2Ba22gydF4y2Ba,包括高分辨率和尺寸精度,易于产生任意多材料的三维结构和大型刚度比值不同的光敏聚合物(~ 10gydF4y2Ba4gydF4y2Ba)。这种刚度比例合理同意预期的生理价值(~ 10gydF4y2Ba3gydF4y2Ba)基于刚度代表矿化(骨头,~ 10 GPa)和软(胶原蛋白、~ 10 MPa)生物组织。尺度之间的距离在3 d印刷原型是1毫米,大约30倍相比,打印机的分辨率(30微米),这保证了软鳞片之间的联系解决。gydF4y2Ba
各向异性弹性是由paraserial连接gydF4y2Ba
先天原型被动载荷作用下的灵活性(自重)覆盖了一个原型包括一系列广场的七十二20毫米尺度half-cylinder模具与曲率半径(gydF4y2BaRgydF4y2Ba米gydF4y2Ba没有外部负载(图的应用。gydF4y2Ba3gydF4y2Ba)。以确保我们的仿生模型可以解决鱼的全方位的灵活性,我们选择规模大小的比例模曲率半径等于生理尺度大小的比例最大生理的曲率半径计算曲率值报告gydF4y2Ba27gydF4y2Ba。gydF4y2Ba

一个gydF4y2Ba原型与一组72年尺度上洒满half-cylinder模具角(gydF4y2BaαgydF4y2Ba)= 0°原型的paraserial轴和模具之间的零曲率。线的曲率霉菌(白色)和原型(红色)。逆曲率代表原型的曲率半径(gydF4y2BaRgydF4y2BapgydF4y2Ba)和模具的曲率半径(gydF4y2BaRgydF4y2Ba米gydF4y2Ba)。原型展示不同曲率在旋转的时候出现gydF4y2BabgydF4y2BaαgydF4y2Ba= 30°,gydF4y2BacgydF4y2BaαgydF4y2Ba= 60°,gydF4y2BadgydF4y2BaαgydF4y2Ba= 90°。gydF4y2BaegydF4y2Ba相对曲率半径(gydF4y2BaRgydF4y2BapgydF4y2Ba/gydF4y2BaRgydF4y2Ba米gydF4y2Ba)vs。gydF4y2BaαgydF4y2Ba为原型,变异而paraserial连接,衬底。误差线代表标准偏差gydF4y2BaNgydF4y2Ba= 3样品/原型设计。gydF4y2BafgydF4y2Ba顶视图的原型gydF4y2BaαgydF4y2Ba= 0°方向。gydF4y2BaggydF4y2Ba顶视图的原型gydF4y2BaαgydF4y2Ba= 90°方向。gydF4y2Ba
原型的灵活性,通过计算曲率半径(gydF4y2BaRgydF4y2BapgydF4y2Ba),随尺度的方向在模具(图。gydF4y2Ba3模拟gydF4y2Ba)。原型的曲率半径相对于模具的曲率半径(gydF4y2BaRgydF4y2BapgydF4y2Ba/gydF4y2BaRgydF4y2Ba米gydF4y2Ba)策划反对取向角(gydF4y2BaαgydF4y2Ba在无花果。gydF4y2Ba3 egydF4y2Ba(gydF4y2BaNgydF4y2Ba= 3 /样本)。原型达到最大的灵活性gydF4y2BaαgydF4y2Ba= 0°,paraserial peg-and-socket轴与模具的轴的零曲率(无花果。gydF4y2Ba3 fgydF4y2Ba);尺度的搭接接头允许列滑离彼此没有阻力,与原型完全符合模具gydF4y2BaRgydF4y2BapgydF4y2Ba=gydF4y2BaRgydF4y2Ba米gydF4y2Ba。原型的曲率半径增加gydF4y2BaαgydF4y2Ba直到达到最大刚度gydF4y2BaαgydF4y2Ba= 90°,peg-and-socket联合是沿着轴模具弯曲(图保持一致。gydF4y2Ba3 d、ggydF4y2Ba);铰接peg-and-socket联合限制列内的运动尺度尺度,从而抵抗弯曲的原型,位于模具上面几乎持平gydF4y2BaRgydF4y2BapgydF4y2Ba= 4.2gydF4y2BaRgydF4y2Ba米gydF4y2Ba。原型是旋转的过去gydF4y2BaαgydF4y2Ba= 90°,peg-and-socket联合返回符合模具的零曲率,和全球的灵活性的回报。第二个原型设计没有paraserial挂钩和套接字之间的连接元素相邻尺度。此原型大会统一表现出最大的灵活性在所有方向,机械与柔性衬底上没有尺度(无花果。gydF4y2Ba3 egydF4y2Ba)。结果表明胶原Sharpey纤维的限制的一个关键结构部件之间的运动范围尺度peg-and-socket联合,从而增加了抗弯强度沿paraserial轴和引进机械系统各向异性。gydF4y2Ba
和抗弯刚度系数尺度流动机制gydF4y2Ba
我们测试了bioinspired灵活组合原型在活跃的加载(弯曲)检查规模如何影响导致当地系数尺度流动机制和生成各向异性力学行为(无花果。gydF4y2Ba4得了gydF4y2Ba)。gydF4y2Ba

一个gydF4y2Ba原型设计的前视图呈现弯曲刚性杆顶部和底部和面向paraserial轴在一个角度(gydF4y2BaφgydF4y2Ba)= 60°的加载方向。gydF4y2BabgydF4y2Ba样品持有人的示意图。gydF4y2BacgydF4y2Ba侧面的gydF4y2BaφgydF4y2Ba= 60°示例加载弯曲在不同垂直位移(gydF4y2BadgydF4y2Ba):gydF4y2BadgydF4y2Ba=(左)和20毫米gydF4y2BadgydF4y2Ba= 80毫米(右)。gydF4y2BadgydF4y2Ba力-位移曲线为原型gydF4y2BaφgydF4y2Ba= 0°30°、60°、90°、120°、150°。gydF4y2BaegydF4y2Ba归一化刚度(gydF4y2BaKgydF4y2Ba)每个阶段的每个原型的加载曲线(实验和有限元模拟)。误差线代表标准偏差gydF4y2BaNgydF4y2Ba= 3样品/原型取向。gydF4y2Ba
反应部队(gydF4y2BaFgydF4y2Ba)和垂直位移(gydF4y2BadgydF4y2Ba原型)(gydF4y2BaNgydF4y2Ba= 3 /方向)在图绘制。gydF4y2Ba4 dgydF4y2Ba。每个方向(gydF4y2BaφgydF4y2Ba)有一个加载响应特征,可分为阶段。刚度(gydF4y2BaKgydF4y2Ba为每个阶段),绘制在无花果。gydF4y2Ba4 egydF4y2Ba加载曲线的斜率,计算和规范化的刚度控制样本没有尺度,包括TangoPlus弹性体。scale-less原型被选为它所代表的控制没有保护性的覆盖物尺度,将有最大的灵活性(最低刚度)。刚度和系数机制在每个加载阶段观察到每个方向都列在下表中gydF4y2Ba1gydF4y2Ba。有限元模型创建的原型也计算模拟弯曲(图。gydF4y2Ba5gydF4y2Ba)。系数尺度流动机制导致的机械响应全球组装图中描述。gydF4y2Ba6gydF4y2Ba。gydF4y2Ba

一个gydF4y2Ba实验原型的弯曲gydF4y2BaφgydF4y2Ba= 0°。压力情节(米塞斯、线性弹性)的有限元模拟gydF4y2BaφgydF4y2Ba= 0°模型。(我)前视图gydF4y2BadgydF4y2Ba= 3毫米(2)gydF4y2BadgydF4y2Ba= 9毫米,(3)gydF4y2BadgydF4y2Ba= 22毫米。gydF4y2BabgydF4y2Ba实验原型的弯曲gydF4y2BaφgydF4y2Ba= 30°。压力的阴谋,前视图(我)gydF4y2BadgydF4y2Ba= 3毫米(2)gydF4y2BadgydF4y2Ba= 14毫米,和(3)gydF4y2BadgydF4y2Ba= 33毫米。gydF4y2BacgydF4y2Ba实验原型的弯曲gydF4y2BaφgydF4y2Ba= 60°。压力的阴谋,前视图(我)gydF4y2BadgydF4y2Ba= 5毫米(2)gydF4y2BadgydF4y2Ba= 8毫米,(3)gydF4y2BadgydF4y2Ba= 38毫米。gydF4y2BadgydF4y2Ba实验原型的弯曲gydF4y2BaφgydF4y2Ba= 90°。压力的阴谋,前视图(我)gydF4y2BadgydF4y2Ba= 12毫米,(2)gydF4y2BadgydF4y2Ba= 43毫米,和(3)gydF4y2BadgydF4y2Ba= 68毫米。gydF4y2BaegydF4y2Ba实验原型的弯曲gydF4y2BaφgydF4y2Ba= 120°。压力的阴谋,前视图(我)gydF4y2BadgydF4y2Ba= 3毫米(2)gydF4y2BadgydF4y2Ba= 12毫米,和(3)gydF4y2BadgydF4y2Ba= 52毫米。gydF4y2BafgydF4y2Ba实验原型的弯曲gydF4y2BaφgydF4y2Ba= 150°。压力的阴谋,前视图(我)gydF4y2BadgydF4y2Ba= 20毫米(2)gydF4y2BadgydF4y2Ba= 38毫米,和(3)gydF4y2BadgydF4y2Ba= 55毫米。gydF4y2Ba

一个gydF4y2Ba图表弯曲过程中观察到的六个系数尺度流动机制。gydF4y2BabgydF4y2Ba实验原型的弯曲(我)gydF4y2BaφgydF4y2Ba= 0°。在垂直位移Paraserial弯曲(gydF4y2BadgydF4y2Ba)= 3毫米,(ii)的样本显示前流程推进衬底gydF4y2BadgydF4y2Ba= 15毫米。(3)gydF4y2BaφgydF4y2Ba= 30°。Paraserial旋转在gydF4y2BadgydF4y2Ba= 15毫米。(iv)gydF4y2BaφgydF4y2Ba= 60°。Paraserial和interserial旋转gydF4y2BadgydF4y2Ba= 50毫米。(v)gydF4y2BaφgydF4y2Ba= 90°。Interserial滑动在gydF4y2BadgydF4y2Ba= 15毫米,侧面,(vi)进一步interserial interserial后滑动接触gydF4y2BadgydF4y2Ba= 60毫米(侧视图)。(七)gydF4y2BaφgydF4y2Ba= 120°。Paraserial interserial旋转和(八)系数联系人gydF4y2BadgydF4y2Ba= 20毫米。(第九)gydF4y2BaφgydF4y2Ba= 150。Paraserial interserial旋转+ interserial斜面gydF4y2BadgydF4y2Ba= 14毫米。gydF4y2Ba
在gydF4y2BaφgydF4y2Ba= 0°方向,paraserial轴的尺度与加载方向保持一致。在第一阶段,鳞片经历paraserial弯曲的兼容TangoPlus peg-and-socket联合抵抗变形(内连接gydF4y2BaKgydF4y2Ba= 47.8,表gydF4y2Ba1gydF4y2Ba)。在第二阶段中,尺度联锁paraserially(无花果。gydF4y2Ba5gydF4y2Ba我),钉周围产生应力集中和套接字(无花果。gydF4y2Ba5gydF4y2Ba.ii)。paraserial联锁原因paraserial旋转的前边缘旋转向衬底,加上interserial旋转当前过程推到衬底(平面)和前的保证金和套接字电梯(飞机的)(6,6 b.i-ii)。在大变形、高内应力分布到全身的鳞片(无花果。gydF4y2Ba5gydF4y2Ba.iii)。gydF4y2Ba
在gydF4y2BaφgydF4y2Ba= 30°方向、尺度最初接受paraserial弯曲(gydF4y2BaKgydF4y2Ba= 126),直到paraserial联锁(无花果。gydF4y2Ba6 bgydF4y2Ba.iii)。联锁引起小paraserial旋转与paraserial弯曲前边缘旋转平面(图。gydF4y2Ba6 bgydF4y2Ba.iii)。尺度的方向给前过程,宽容不是被迫衬底;没有耦合interserial旋转,和刚度下降(gydF4y2BaKgydF4y2Ba= 21.7)。随着弯曲模型,强调paraserial网站的形式,在挂钩系数联系和相邻尺度上的插座;压力的壮大和分布在表面弯曲度较高的规模(无花果。gydF4y2Ba5 bgydF4y2Ba.i-iii)。在大变形,paraserial失败发生在平行整个示例(图。gydF4y2Ba5 bgydF4y2Ba.iii),之后的原型并没有提供抵抗全球弯曲(gydF4y2BaKgydF4y2Ba< 0)。gydF4y2Ba
在gydF4y2BaφgydF4y2Ba= 60°方向,鳞片首先接受interserial滑动规模下的架子前幻灯片在相邻列不产生任何压力量表(无花果。gydF4y2Ba5度gydF4y2Ba我)。取向的斜角导致鳞片触摸interserially和抵抗变形(gydF4y2BaKgydF4y2Ba= 31.3)而产生强调现场的联系(图。gydF4y2Ba5度gydF4y2Ba.ii)。随着样品继续弯曲,interserial联锁原因小paraserial旋转(前缘移动的平面)加上大interserial旋转(前过程的平面移动;前的利润率和套接字进入飞机)来适应interserial滑动(图。gydF4y2Ba6 bgydF4y2Ba.iv)。强调增长系数接触的网站并扩散到全身的鳞片(无花果。gydF4y2Ba5度gydF4y2Ba.iii)。兼容paraserial连接抵抗旋转但不失,原型是能承受负载,因为它弯曲(gydF4y2BaKgydF4y2Ba= 10.5)。gydF4y2Ba
在gydF4y2BaφgydF4y2Ba= 90°方向,paraserial轴垂直于加载方向。在弯曲,尺度相对移动的列通过interserial滑动(图。gydF4y2Ba5 dgydF4y2Ba我6 b.v),唯一的抗弯能力来自尺度下的底物的拉伸应力。在这里,严格的尺度是“机械无形”他们不提供任何抗弯强度一样,和样本的刚度匹配的衬底(gydF4y2BaKgydF4y2Ba= 0.99)。大程度的变形,天平开始触摸interserially(无花果。gydF4y2Ba6 bgydF4y2Ba.v vi)。规模接触导致的列尺度旋转轴脊,进一步紧张兼容的材料在附件衬底和强调引入尺度的中心(无花果。gydF4y2Ba5 dgydF4y2Ba.ii-iii)。因此,样品的刚度增加(gydF4y2BaKgydF4y2Ba= 4.23)。gydF4y2Ba
当gydF4y2BaφgydF4y2Ba= 120°弯曲原型的话,第一步通过interserial滑动。然而,前过程立即推入衬底,而这些接触诱导paraserial旋转(前边缘进入飞机)加上interserial旋转(前过程和挂钩进入飞机;前的利润率和套接字离开飞机)来生成额外的paraserial和interserial规模联系人(图。gydF4y2Ba6 bgydF4y2Ba.vii-viii)依次生成高刚度(gydF4y2BaKgydF4y2Ba= 124)。周围的应力集中形式在区域尺度挂钩和套接字paraserial联系人发生(图。gydF4y2Ba5 egydF4y2Ba我),网站的interserial尺度(图列之间的联系。gydF4y2Ba5 egydF4y2Ba.ii),整个基质前流程推动的地方。这些规模连锁导致高刚度与进一步弯曲(gydF4y2BaKgydF4y2Ba= 46.8)。在非常大的变形,鳞片张开interserially(无花果。gydF4y2Ba5 egydF4y2Ba与降低刚度.iii)进一步适应滑动(gydF4y2BaKgydF4y2Ba= 24.1)。gydF4y2Ba
的gydF4y2BaφgydF4y2Ba= 150°原型是笔直的方向。发病时的弯曲,小程度的paraserial弯曲导致前流程立即进军衬底的后端前缘影响着相邻列的规模。这些规模进一步paraserial弯曲的联系人不允许,提供对interserial滑动,导致高刚度(gydF4y2BaKgydF4y2Ba= 450)。进一步弯曲,规模接触导致paraserial旋转(前边缘进入飞机)加上interserial旋转(图。gydF4y2Ba6 bgydF4y2Ba.ix);然而,联锁尺度继续抵抗弯曲刚度高(gydF4y2BaKgydF4y2Ba= 80.9)和高压力是持续的接触网站的规模和传遍选择性(图列的鳞片。gydF4y2Ba5 fgydF4y2Ba.i-ii)。在规模非常大的变形,联锁抵抗弯曲,这样的棒插入样品持有人退出来适应高压力在整个变形模型(图。gydF4y2Ba5 fgydF4y2Ba.iii)。最终,兼容paraserial互联开始撕裂,和小paraserial弯曲度的变化状况进行了观察,同时连锁规模允许原型来维持高负载(gydF4y2BaKgydF4y2Ba= 21.4)。gydF4y2Ba
对于所有方向,测量刚度gydF4y2BaKgydF4y2Ba小于预期的(即从rule-of-mixtures组合。均匀混合)的刚性和软光敏聚合物。僵硬的体积百分比(VeroWhite 2.0 GPa)和兼容(TangoPlus, 0.63 MPa)材料印刷的原型分别为46%和54%,分别切除后支持材料,因此预计rule-of-mixtures刚度均匀混合的0.92绩点(预测gydF4y2BaKgydF4y2Ba= 1460),类似于半刚性的高密度聚乙烯等塑料,不会将提供可衡量的悬垂性的被动加载测试。这说明覆盖物的分割成离散的重要性,morphometrically复杂尺度为了实现各向异性的灵活性,同时提供保护。gydF4y2Ba
讨论gydF4y2Ba
层次结构的形状和材料生物外骨骼的设计原则是翻译gydF4y2Bap . senegalusgydF4y2Ba并集成到bioinspired灵活组合原型,包括严格的尺度的复杂形状、系数联合关节结构、尺度的组装成一个装甲表面和软连接组件(衬底,scale-to-substrate依恋,paraserial连接)。原型能够复制的生物力学行为生物外骨骼,复杂的形状和规模联合关节导致当地,系数尺度流动机制,进而确定弯曲响应全球样本,并产生全球各向异性(orientation-dependent)机械行为尺度组装。gydF4y2Ba
鱼从事凸与凹弯曲在其正常的波动gydF4y2Ba27gydF4y2Ba。我们选择看凹弯曲,因为scale-to-scale接触产生更大的抗弯强度。两个最低硬度取向,gydF4y2BaφgydF4y2Ba= 90°和gydF4y2BaφgydF4y2Ba= 60°,对应于鱼的两种常见弯曲模式:分别为轴向弯曲和扭转gydF4y2Ba27gydF4y2Ba,gydF4y2Ba28gydF4y2Ba。在这些方向,interserial滑动机制允许装配弯下小应用负载没有生成系数联系人或引入应力浓度在尺度变形的初始阶段。在90°方向,所有菌株都持续在衬底36%变形垂直(40毫米/ 112毫米总样本高度),和样本刚度匹配的控制样本没有任何尺度。由于严格的尺度是“机械无形”和不造成任何抗弯强度,我们表明,可以使用形状作为材料设计参数创建复合材料,提供额外的保护的硬材料(如天平),同时保持了低抗弯刚度的兼容的材料(例如,衬底)。60°方向,所有菌株都持续在衬底变形4.5%,之后的方向尺度相对于加载方向允许系数联系人(即利用低刚度系数尺度流动机制。耦合paraserial interserial旋转),继续使interserial滑动的鳞片。gydF4y2Ba
高刚度方向对应于弯曲模式的鱼不参与;例如,150°弯曲背腹占水平面通过中间的鱼。因此,复杂的几何形状和方向尺度使皮肤的灵活性的方向,它使用轴向弯曲和扭转,并限制了灵活性的方向并不需要。特性,比如前长方形的前处理和凹边缘接触衬底和联锁与周边扩展到覆盖全身的鳞片在真皮的尺度移除了彼此之外,例如,在腹鳞斜面除了面向对方因为它们离的平面轴向弯曲或扭转gydF4y2Ba29日gydF4y2Ba,在尺度上,在凸弯滑开。gydF4y2Ba
了解复杂materials-morphometric自然外骨骼设计规则和翻译他们合成为仿生设计拥有巨大的应用灵活的盔甲gydF4y2Ba16gydF4y2Ba,gydF4y2Ba36gydF4y2Ba。通过创建灵活组合原型启发的规模盔甲gydF4y2Bap . senegalusgydF4y2Ba,我们已经生成的一个设计方案展示一系列广泛的力学行为与抗弯刚度等几个数量级(gydF4y2BaKgydF4y2Ba= 1 - 450),从而展示形态测量学可以调整的灵活性防护,复合体系结构没有改变组成材料或他们的体积分数。并发和未来工作寻求整合的形态学异质性gydF4y2Ba29日gydF4y2Ba,gydF4y2Ba33gydF4y2Ba,能力符合任意曲面gydF4y2Ba33gydF4y2Ba异质性,intrascale材料gydF4y2Ba37gydF4y2Ba成一个真正的原型设计的分层设计,复制所有方面生物盔甲。仿生铠甲利用分段设计具有巨大的潜力为各种各样的应用程序,允许损伤定位、灵活性,减少制造成本,和选择替换损坏的单位。gydF4y2Ba
方法gydF4y2Ba
鱼鳞提取和三维重建gydF4y2Ba
从生活的尺度是手术切除gydF4y2Bap . senegalusgydF4y2Ba标本(体长219毫米)。0.03 wt. %的标本是麻醉三卡因溶液显示出(ms - 222,西格玛奥德里奇)在水中与氢氧化钾中和。四个尺度从49中删除gydF4y2BathgydF4y2Ba列的左边侧面与无菌标本,surgical-grade解剖刀。鱼被转移到anesthetic-free水恢复,然后返回一个检疫水族馆、与四环素抗生素治疗(每天250毫克每10加仑的水)两个星期,直到天平开始再生。执行所有工作与生活标本按照动物保健和IACUC麻省理工学院委员会规定。切除尺度使用x射线扫描microtomography(µCT)和重建表面完全嵌合文件(STL)下面我们以前公布的过程gydF4y2Ba29日gydF4y2Ba。两个相邻的鳞片被分割成两半然后重新组装成一个“组合”规模几何(图。gydF4y2Ba1gydF4y2Ba),可以聚集在平铺的安排。组合规模几何是瓷砖表面研究尺度的几何原理清晰度(无花果。gydF4y2Ba1 bgydF4y2Ba)。然后我们选择的主要几何特征模拟3 d建模的仿生设计:规模挂钩(P),套接字(S),前处理(美联社),前货架(),凹前保证金(AM)和增厚轴脊(AR)。gydF4y2Ba
计算3 d建模的原型gydF4y2Ba
几何的形态学分析用于定义的几何尺度从规模3 d对象及其特征之后我们以前公布的过程gydF4y2Ba29日gydF4y2Ba。参数化CAD软件(SOLIDWORKSgydF4y2Ba®gydF4y2Ba法国达索系统公司股价SolidWorks Corp .)被用来设计一个抽象的几何尺度的三维模型20毫米长度与整体菱形形状允许锥形尺度之间的重叠区域,四面体挂钩,相应的倒凹窝。关联建模用于复制个体规模几何与1毫米平方阵列间距paraserial和interserial方向。软组织衬底被建模为一个单独的层。挂钩和套接字之间的连接元素建模相邻尺度和尺度和衬底之间附加层。用于测量曲率半径的原型设计的方形阵列72尺度的20毫米在衬底。弯曲试验的原型设计的112×124毫米阵列与刚性棒10毫米直径20毫米尺度样品的顶部和底部。原型设计出口作为单独的STL文件刚性组件(规模、棒)和软组件(衬底,连接元素)。gydF4y2Ba
多材料3 d打印gydF4y2Ba
原型是捏造的一系列灵活的尺度上通过多材料3 d打印(垃圾箱Connex500™, Stratasys公司,美国)。原型的STL文件导入到垃圾箱里工作室分配给商用软件和所用的光敏聚合物材料:刚性组件是印有VeroWhite(硬塑料和弹性模量(gydF4y2BaEgydF4y2Ba)= 2.0的绩点gydF4y2Ba34gydF4y2Ba,gydF4y2Ba35gydF4y2Ba),软组件印有TangoPlus(橡胶弹性体gydF4y2BaEgydF4y2Ba= 0.63 MPagydF4y2Ba34gydF4y2Ba,gydF4y2Ba35gydF4y2Ba)。打印作业被提交使用数码印刷模式30µm决议。打印支持材料被水射流和手动刷牙。gydF4y2Ba
弯曲试验gydF4y2Ba
原型在自重下的曲率半径覆盖了原型弯曲,half-cylinder模具(半径gydF4y2BaRgydF4y2Ba米gydF4y2Ba= 120毫米)没有一个外部负载的应用,拿着相机位于沿模具零曲率的轴。原型在模具旋转了一个角度gydF4y2BaαgydF4y2Ba= 0 - 180°,gydF4y2BaαgydF4y2Ba= 0°对应paraserial peg-and-socket轴与模具的零曲率、轴和gydF4y2BaαgydF4y2Ba= 90°对应paraserial轴与曲率模的轴。在每一个方向,正常投影棒插入一行三个尺度曲率模的轴平行,和原型的曲率半径(gydF4y2BaRgydF4y2BapgydF4y2Ba)是衡量画一个圆圈在正常点之间的连接杆和尺度。实验重复三个样本(gydF4y2BaNgydF4y2Ba= 3)。gydF4y2Ba
弯曲试验gydF4y2Ba
原型设计的机械测试弯曲刚性杆顶部和底部的组装和鳞片排列取向角(gydF4y2BaφgydF4y2Ba)0°30°、60°、90°、120°、150°,gydF4y2BaφgydF4y2Ba被定义为peg-and-socket轴之间的夹角和加载方向。控制样本组成的固体TangoPlus表没有鳞片印刷作为一个控制样本。原型是实验测试在弯曲引起的轴向压缩力学试验机(茨威格Z010、茨威格Roell、德国)使用负载细胞从20到2500 N。样品持有人被设计,3 d打印,贴在负载细胞Permacel(日东)带心边界条件,使杆旋转的gydF4y2BaxgydF4y2Ba设在和限制旋转gydF4y2BaygydF4y2Ba- - -gydF4y2BazgydF4y2Ba相互重合,以防止全球扭曲的样本。样本诱导变形凹(天平面对)通过设置一个初始横向1毫米的挠度和归零法在位移控制的力压加载的应变率1 mm / s。反应部队(gydF4y2BaFgydF4y2Ba)和垂直位移(gydF4y2BadgydF4y2Ba)为原型进行了测量,实验有三个样品执行(gydF4y2BaNgydF4y2Ba= 3)方向。示例刚度(gydF4y2BaKgydF4y2Ba)计算加载曲线的斜率和规范化的刚度控制样本组成的一张4.4毫米的TangoPlus没有尺度(gydF4y2BaKgydF4y2Ba= 7.22 N / m)。gydF4y2Ba
有限元建模gydF4y2Ba
三个部分被设计为模型使用有限元软件(有限元分析,达索系统公司股价,法国)和网状C3D4(压力标准,线性)元素:一个简化的几何,基材,刚性棒。VeroWhite被建模为一个各向同性线弹性材料(gydF4y2BaEgydF4y2Ba= 2.0的绩点,gydF4y2BaνgydF4y2Ba= 0.43,gydF4y2BaρgydF4y2Ba= 1.175克/厘米gydF4y2Ba3gydF4y2Ba)和分配尺度和刚性棒。TangoPlus被建模为一个新虎克超弹性的材料(C11 = 0.63 MPa和D1 = 10gydF4y2Ba6gydF4y2Ba),分配到衬底。挂钩之间的TangoPlus互联和套接字相邻尺度建模为弹簧刚度为0.63 MPa。心边界条件被应用到模型匹配实验条件,和凹弯曲模拟位移控制压缩加载诱发侧向弯曲的样本。力-位移曲线(F-d)生成的反应力与顶杆在每一个增量的垂直位移。刚度值(gydF4y2BaKgydF4y2Ba)计算的斜率F-d数据和规范化的刚度控制模型组成的一张4.4毫米的TangoPlus没有尺度(gydF4y2BaKgydF4y2Ba= 10.7 N / m)。压力(米塞斯、线性弹性,平均)捕获通过整个模型在每10增量。gydF4y2Ba
数据可用性声明gydF4y2Ba
的数据支持这项研究的结果将由相应的作者在合理的请求。gydF4y2Ba
代码的可用性语句gydF4y2Ba
的代码支持这项研究的结果将由相应的作者在合理的请求。gydF4y2Ba
引用gydF4y2Ba
拉伯,D。,Sachs, C. & Romano, P. The crustacean exoskeleton as an example of a structurally and mechanically graded biological nanocomposite material.Acta板牙。gydF4y2Ba53gydF4y2Ba,4281 - 4292 (2005)。gydF4y2Ba
Barbakadze, N。恩德斯,S。,Gorb, S. & Arzt, E. Local mechanical properties of the head articulation cuticle in the beetlePachnoda marginatagydF4y2Ba(鞘翅目,gydF4y2Ba金龟子科gydF4y2Ba)。gydF4y2Baj . Exp。杂志。gydF4y2Ba209年gydF4y2Ba,722 - 730 (2006)。gydF4y2Ba
Yourdkhani, M。,Pasini, D. & Barthelat, F. Multiscale mechanics and optimization of gastropod shells.j .仿生Eng。gydF4y2Ba8gydF4y2Ba,357 - 368 (2011)。gydF4y2Ba
Wyneken, J。,Godfrey, M. H. & Bels, V.海龟生物学:从结构到生活的策略gydF4y2Ba。(CRC出版社,2007年)。gydF4y2Ba
克劳斯,S。,Monsonego-Ornan, E., Zelzer, E., Fratzl, P. & Shahar, R. Mechanical function of a complex three-dimensional suture joining the bony elements in the shell of the red-eared slider turtle.放置板牙。gydF4y2Ba21gydF4y2Ba,407 - 412 (2009)。gydF4y2Ba
波特- M M。,Novitskaya, E., Castro-Ceseña, A. B., Meyers, M. A. & McKittrick, J. Highly deformable bones: unusual deformation mechanisms of seahorse armor.Acta Biomater。gydF4y2Ba9gydF4y2Ba,6763 - 6770 (2013)。gydF4y2Ba
波特- M M。,Adriaens, D., Hatton, R. L., Meyers, M. A. & McKittrick, J. Why the seahorse tail is square.科学gydF4y2Ba349年gydF4y2Baaaa6683 (2015)。gydF4y2Ba
Bruet, b . j . F。、歌曲、J。,Boyce, M. C. & Ortiz, C. Materials design principles of ancient fish armour.Nat。板牙。gydF4y2Ba7gydF4y2Ba,748 - 756 (2008)。gydF4y2Ba
歌,j . et al .定量微观结构研究的盔甲海洋threespine棘鱼(gydF4y2BaGasterosteus aculeatusgydF4y2Ba)。gydF4y2Baj . Struct。医学杂志。gydF4y2Ba171年gydF4y2Ba,318 - 331 (2010)。gydF4y2Ba
歌,J。,Ortiz, C. & Boyce, M. C. Threat-protection mechanics of an armored fish.j .机械工程。Behav。生物医学。板牙。gydF4y2Ba4gydF4y2Ba,699 - 712 (2011)。gydF4y2Ba
奥尔蒂斯,c &博伊斯,m . c . Bioinspired结构材料。gydF4y2Ba科学gydF4y2Ba319年gydF4y2Ba,1053 - 1054 (2008)。gydF4y2Ba
邓洛普,j . w . C。,Weinkamer, R. & Fratzl, P. Artful interfaces within biological materials.板牙。今天gydF4y2Ba14gydF4y2Ba,70 - 78 (2011)。gydF4y2Ba
温赖特,s。gydF4y2Ba机械设计在生物gydF4y2Ba。(普林斯顿大学出版社,1982)。gydF4y2Ba
维纳,s & Addadi l .矿化生物材料的设计策略。gydF4y2Baj .板牙。化学。gydF4y2Ba7gydF4y2Ba,689 - 702 (1997)。gydF4y2Ba
迈耶斯,m·A。、陈P.-Y。,Lin, A. Y.-M. & Seki, Y. Biological materials: structure and mechanical properties.掠夺。板牙。科学。gydF4y2Ba53gydF4y2Ba1 - 206 (2008)。gydF4y2Ba
杨,w . et al。护甲类型:自然灵活的真皮。gydF4y2Ba放置板牙。gydF4y2Ba25gydF4y2Ba31-48 (2013)。gydF4y2Ba
李,Y。,Ortiz, C. & Boyce, M. C. Stiffness and strength of suture joints in nature.理论物理。启EgydF4y2Ba84年gydF4y2Ba062904 (2011)。gydF4y2Ba
李,Y。,Ortiz, C. & Boyce, M. C. Bioinspired, mechanical, deterministic fractal model for hierarchical suture joints.理论物理。启EgydF4y2Ba85年gydF4y2Ba031901 (2012)。gydF4y2Ba
l &奥尔蒂斯,c .生物同时光学透明度和机械可靠性设计的外壳Placuna胎盘。gydF4y2Ba放置板牙。gydF4y2Ba25gydF4y2Ba,2344 - 2350 (2013)。gydF4y2Ba
谢尔曼et al .微观结构和几何的保护范围的影响gydF4y2BaAtractosteus抹刀gydF4y2Ba。gydF4y2Baj . r . Soc。接口gydF4y2Ba13gydF4y2Ba,20160595 (2016)。gydF4y2Ba
马提尼酒,r & Barthelat f . Stretch-and-release制造、测试和优化的一个灵活的陶瓷装甲设计灵感来自鱼鳞。gydF4y2BaBioinspir。Biomim。gydF4y2Ba11gydF4y2Ba066001 (2016)。gydF4y2Ba
马提尼等。比较研究仿生防护范围使用3 d打印技术和机械测试。gydF4y2BaActa Biomater。gydF4y2Ba55gydF4y2Ba,360 - 372 (2017)。gydF4y2Ba
褐变,。,Ortiz, C. & Boyce, M. C. Mechanics of composite elasmoid fish scale assemblies and their bioinspired analogues.j .机械工程。Behav。生物医学。板牙。gydF4y2Ba19gydF4y2Ba,75 - 86 (2013)。gydF4y2Ba
康纳斯,m . j . et al。三维结构的壳板石鳖的组装gydF4y2BaTonicella marmoreagydF4y2Ba及其生物力学的影响。gydF4y2Baj . Struct。医学杂志。gydF4y2Ba177年gydF4y2Ba,314 - 328 (2012)。gydF4y2Ba
陛下,J.-Y。从ganoid elasmoid尺度辐亚纲的鱼类。gydF4y2BaNeth。j .黑旋风。gydF4y2Ba40gydF4y2Ba,75 - 92 (1989)。gydF4y2Ba
Daget, J。,Gayet, M., Meunier, F. J. & Sire, J.-Y. Major discoveries on the dermal skeleton of fossil and recent polypteriforms: a review.鱼鱼gydF4y2Ba2gydF4y2Ba,113 - 124 (2001)。gydF4y2Ba
Gemballa s &高p架构降低teleostomes:皮肤的功能形态学和进化意义。gydF4y2Baj . Morphol。gydF4y2Ba253年gydF4y2Ba,290 - 309 (2002)。gydF4y2Ba
泰特尔,e . d . &兰黛g . v . C-start逃避的反应gydF4y2BaPolypterus senegalusgydF4y2Ba:双边肌肉活动和变化在阶段1和2。gydF4y2Baj . Exp。杂志。gydF4y2Ba205年gydF4y2Ba,2591 - 2603 (2002)。gydF4y2Ba
Varshney, S。、歌曲、J。李,Y。,Boyce, M. C. & Ortiz, C. Morphometric structural diversity of a natural armor assembly investigated by 2D continuum strain analysis.j . Struct。医学杂志。gydF4y2Ba192年gydF4y2Ba,487 - 499 (2015)。gydF4y2Ba
d·m·皮尔逊polypterid鱼类的皮肤的功能方面。gydF4y2Ba黑旋风。j·林恩。Soc。gydF4y2Ba72年gydF4y2Ba,93 - 106 (1981)。gydF4y2Ba
Rudykh s &博伊斯,m . c .分析elasmoid鱼的叠瓦状分层scale-tissue系统及其仿生类似物在有限的压力和弯曲。gydF4y2BaIMA j .达成。数学。gydF4y2Ba79年gydF4y2Ba,830 - 847 (2014)。gydF4y2Ba
Rudykh, S。,Ortiz, C. & Boyce, C. M. Flexibility and protection by design: imbricated hybrid microstructures of bio-inspired armor.软物质gydF4y2Ba11gydF4y2Ba,2547 - 2554 (2015)。gydF4y2Ba
Duro-Royo j . et al . MetaMesh:分层计算模型的设计和制造仿生装甲表面。gydF4y2Ba第一版。降落凡间的Des。gydF4y2Ba60gydF4y2Ba14-27 (2015)。gydF4y2Ba
林,E。,李,Y。,Ortiz, C. & Boyce, M. C. 3D printed, bio-inspired prototypes and analytical models for structured suture interfaces with geometrically-tuned deformation and failure behavior.j .机械工程。理论物理。固体gydF4y2Ba73年gydF4y2Ba,166 - 182 (2014)。gydF4y2Ba
林,E。,李,Y。,Weaver, J. C., Ortiz, C. & Boyce, M. C. Tunability and enhancement of mechanical behavior with additively manufactured bio-inspired hierarchical suture interfaces.j .板牙。Res。gydF4y2Ba29日gydF4y2Ba,1867 - 1875 (2014)。gydF4y2Ba
大卫:V。,Gao, X.-L. & Zheng, J. Q. Ballistic resistant body armor: Contemporary and prospective materials and related protection mechanisms.达成。动力机械。牧师。gydF4y2Ba62年gydF4y2Ba,050802 - 050802 (2009)。gydF4y2Ba
阿瑞亚,s . et al . Bioinformed表述行为的复合结构:从生物微结构材料复合材料和铰接总成,gydF4y2BaECAADegydF4y2Ba31日gydF4y2Ba,575 - 584 (2013)。gydF4y2Ba
确认gydF4y2Ba
这项研究是由美国国家科学基金会资助的部分研究生研究奖学金授予1122374下,协同生物技术研究所通过授予w911nf - 09 - 0001从美国陆军研究办公室,士兵纳米技术研究所通过授予w911nf - 13 - d - 0001从美国陆军研究办公室,和国家安全科学与工程学院奖学金计划通过授予n00244 - 09 - 1 - 0064。作者感谢胡哈歌,燕Li和马修·康纳斯协助初始样品制备,实验设计和初步数据。作者还要感谢教授乔治·兰黛(哈佛大学)进行切除手术,规模和Neri Oxman教授(麻省理工学院)有用的讨论。的内容并不一定反映政府的立场,也没有官方认可应该推断。gydF4y2Ba
作者信息gydF4y2Ba
作者和联系gydF4y2Ba
贡献gydF4y2Ba
K.Z. S.R.建模和3 d打印的原型;K.Z. S.V.设计原型的实验测试,分析数据,和写的手稿;S.V.进行有限元建模;E.M.A.协助数据解释和手稿准备;医学博士,M.C.B., and C.O. advised on all aspects of the research and manuscript. S.V. and K.Z. contributed equally to the study. All authors discussed the results and commented on the manuscript.
相应的作者gydF4y2Ba
道德声明gydF4y2Ba
相互竞争的利益gydF4y2Ba
狱警,M.C.B., and S.H.R. are coinventors on patent US8978535 “Articulating protective system for resisting mechanical loads” (Date of Patent March 17, 2015) which relates to the current work. The authors have no other competing interests as defined by Springer Nature, or other interests that might be perceived to influence the results and/or discussion reported in this article.
额外的信息gydF4y2Ba
同行审查的信息gydF4y2Ba主要处理编辑器:约翰•普卢默。gydF4y2Ba
出版商的注意gydF4y2Ba施普林格自然保持中立在发表关于司法主权地图和所属机构。gydF4y2Ba
补充信息gydF4y2Ba
权利和权限gydF4y2Ba
开放获取gydF4y2Ba本文是基于知识共享署名4.0国际许可,允许使用、共享、适应、分布和繁殖在任何媒介或格式,只要你给予适当的信贷原始作者(年代)和来源,提供一个链接到Creative Commons许可,并指出如果变化。本文中的图片或其他第三方材料都包含在本文的创作共用许可,除非另有说明在一个信用额度的材料。如果材料不包括在本文的创作共用许可证和用途是不允许按法定规定或超过允许的使用,您将需要获得直接从版权所有者的许可。查看本许可证的副本,访问gydF4y2Bahttp://creativecommons.org/licenses/by/4.0/gydF4y2Ba。gydF4y2Ba
关于这篇文章gydF4y2Ba

引用这篇文章gydF4y2Ba
Zolotovsky, K。、Varshney年代。、Reichert年代。gydF4y2Baet al。gydF4y2Ba与各向异性抗弯刚度Fish-inspired柔性防护材料系统。gydF4y2BaCommun板牙gydF4y2Ba2gydF4y2Ba35 (2021)。https://doi.org/10.1038/s43246 - 021 - 00140 - 3gydF4y2Ba
收到了gydF4y2Ba:gydF4y2Ba
接受gydF4y2Ba:gydF4y2Ba
发表gydF4y2Ba:gydF4y2Ba
DOIgydF4y2Ba:gydF4y2Bahttps://doi.org/10.1038/s43246 - 021 - 00140 - 3gydF4y2Ba
本文引用的gydF4y2Ba
细胞外matrix-inspired透明质酸水凝胶,凝胶交联与转谷氨酰胺酶活性序列通过一个链接模块gydF4y2Ba
通讯材料gydF4y2Ba(2022)gydF4y2Ba
特殊属性hyper-resistant盔甲的深海热液喷口螃蟹gydF4y2Ba
科学报告gydF4y2Ba(2022)gydF4y2Ba
